Alright, the values are quite accurate now for Y. (And cruise control is still going to be a thing... They really didn't put a cap on this acceleration...)
As a test I tried max cruise control on emu and console, BizHawk's FFF5/FFF6 = 0D/C0, console = 0E/C0, but of course console wasn't perfectly 90 degrees both ways. And I think the range can be slightly lower.
I also thoroughly tested the effect that max Y rotation has on the X coordinate and it seems close enough. Max Y at this point completely nullifies the X value, but that seems to match up quite close with cart, especially if the range is lowered slightly. I'll look more into this with 216 range, as our ability to move horizontally while keeping Y tilt high is very important in the TAS.
Looking more into 'flicking' as best I can, I think the outliers in my maximums were definitely due to slight decreases in angle resulting in a one frame increase in the value. I gently wiggled my cart in the -90 area and managed to see a 45/20.
BizHawk test: going from -90 to -85 to -90: one frame of 46/10, one frame of 43/60. Going from -90 to 0 to -90: 4F/80, 2C/30
I was hoping if I can re-freeze the game quick enough, I may be able to see the effects that switching from -90 to 0 have on the cart in the 31-frame calibration buffer. Unfortunately, freezing doesn't seem to cause any wild jumps. I have 38 one frame, and 44/80 the next. On Bizhawk I'd have a frame of far lower than 38 before it bounces back. So this is a physical real-world real-time effect the accelerometer has?
Well, that makes it impossible to test large changes occurring in only one frame. But I tried a wild rocking back and forth (probably 30 degrees each way?) and I'll just list my values:
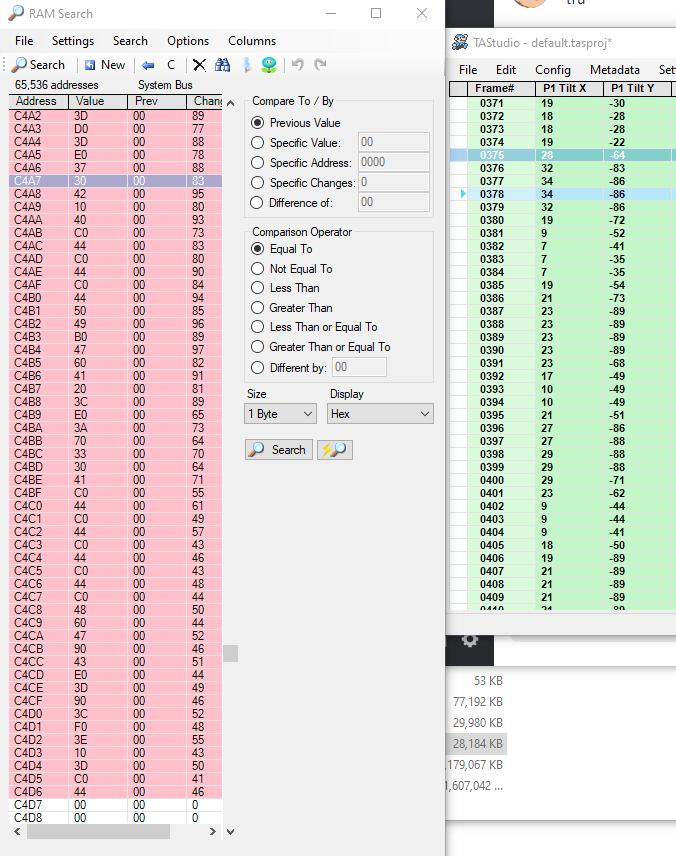
38/A0, 3D/80, 45/C0, 4C/50, 4F/10, 48/10, 3B/E0, 34/60, 37/00, 41/B0, 49/F0, 4E/90, 4B/50, 44/90, 3E/90, 3E/A0, 44/50, 45/20, 44/50, and more 44's (stabilization while pressing my freeze button likely)
So, the highest seen was 4F/10. And it can dip all the way down to 34 briefly.
Tried a similar thing my moving my stick up to up-mid in recording mode:
Overall I can't speak to the accuracy of your code, only the range; the range looks to actually be too low. I see 49 max, and 90 -> 0 reaches the 4F that cart can do within 30 degrees. (A higher range would make the 90 -> 0 number get even more extreme, but, it is a superhuman tilt to make in one frame! So maybe that's good that it'd be even more extreme! I don't know!)
So tl;dr: I think there are still three things to work on.
One is, the range may be better off at the 216 exactly. The outliers above 80 subvalue were almost definitely due to flicking, and shouldn't be consistently obtainable. Currently 44/80 requires -78 angle in Bizhawk, and I'm sure I was holding my cart at higher than -78 to get a 44/80 average.
One is the desyncing when flicking from max to neutral and reloading savestates. I am not sure how easy to do, but however many prior inputs are used to calculate new ones, loading a state would have to jump back that many extra frames.
And perhaps the flicking code needs to affect the number more...






 Skipping the robot guards during the boss stages.
Skipping the robot guards during the boss stages.
